在北京市大兴区,2024 T-EDGE创新大会暨钛媒体财经年会于12月6日至7日盛大举行。此次大会以“全力投入全球化与人工智能”为主题,汇聚了全球各地的科技和商业精英,共同探讨人工智能对全球各行业的深远影响以及企业全球化增长的新趋势。
7日上午,T-EDGE全球AI论坛——“全力投入人工智能”环节,波士顿动力机器人创始人、人工智能研究所执行董事马克·雷伯特发表了题为“动态智能机器人的未来”的演讲。他深入探讨了AI、机器人技术和波士顿动力业务的相关话题,为与会者带来了深刻的见解。
雷伯特表示,AI正在以前所未有的速度推动机器人技术的发展。近年来,中国、美国和欧洲在机器人技术方面都取得了显著的进步。他提出,未来的机器人将具备两种“智力”:动态智能和认知智能。动态智能涉及机器人身体的运作方式,如通过感官控制本体,保持运动时的正常机能;而认知智能则涉及使用语言实现“脑中所想”。
雷伯特认为,现在是涉足机器人领域的最佳时机,但他也强调,AI大语言模型(LLM)与人形机器人所能完成的任务之间仍存在巨大差距。他期待能缩小基于语言的认知智能与动态智能之间的差距。
75岁的雷伯特是波士顿动力机器人的创始人,曾任麻省理工学院计算机科学和电子工程系教授,以及卡内基·梅隆大学计算机科学和机器人学副教授。他创立的研究动力机器人科学根据的实验室,研发出了第一款能自己平衡的跳跃机器人。
雷伯特透露,目前最快的机器人由波士顿动力制造,时速高达20英里。波士顿动力正在开发三种机器人:Spot机器人、Stretch仓储机器人和Atlas人形机器人。他表示,通过优化和使用强化学习,机器人的运行速度提高了约2.5倍,速度达到每秒5.3米。
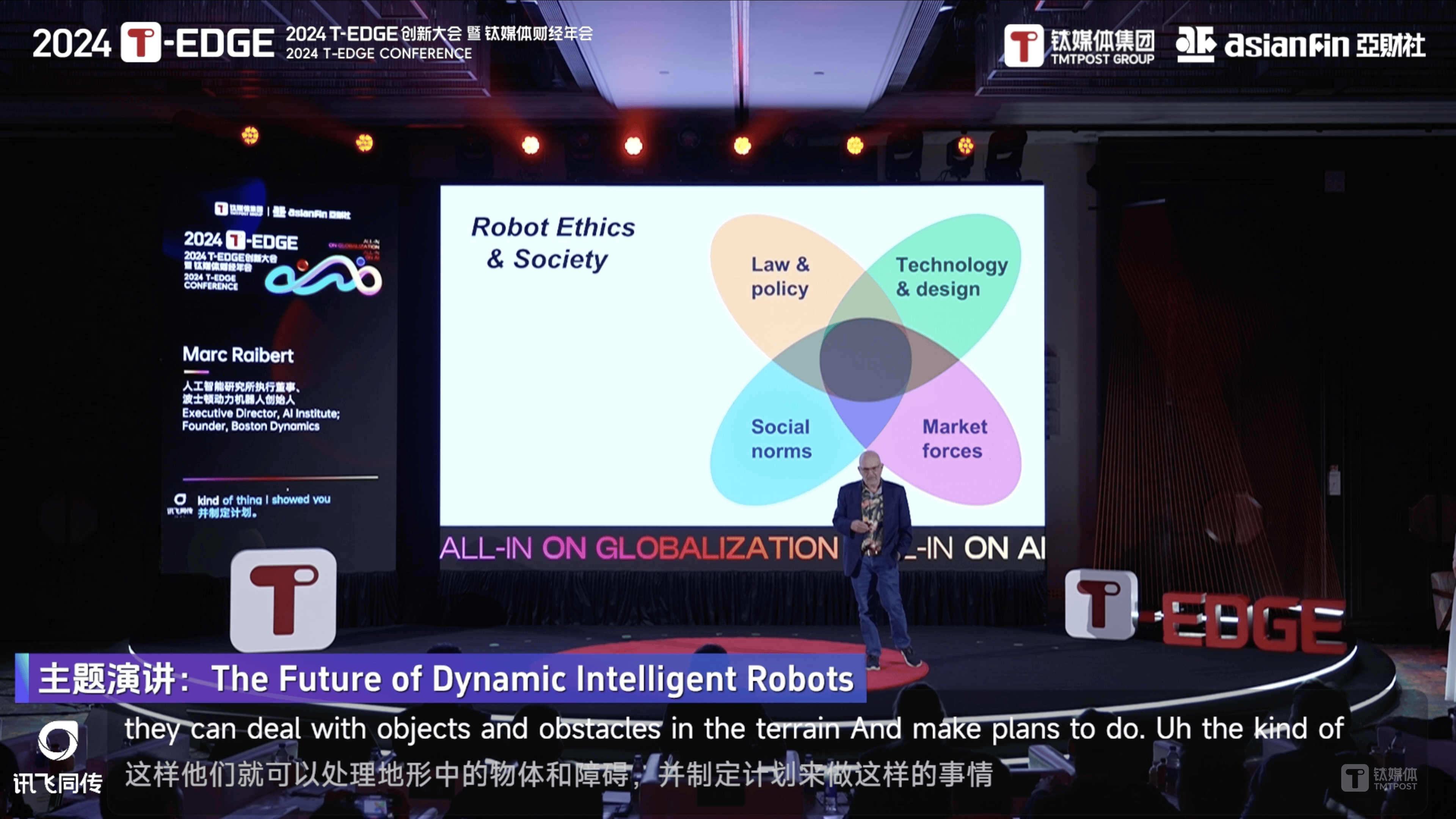
在雷伯特看来,开发机器人首先需要“平衡”,两轮双足的“倒退”、爬坡、扔到空中等动作非常关键。因此,开发机器人硬件和软件同等重要,AI能帮助检测地形、障碍,让机器人决定需要做出什么样的动作。
雷伯特已成立人工智能研究所,旨在成为机器人技术领域的贝尔实验室。他表示,对机器人技术的兴奋主要源于接受挑战,让机器人具有行为能力,智能达到人类水平,就像攀登珠穆朗玛峰一样充满挑战。
对于中国人形机器人的发展,雷伯特持怀疑态度。他认为,双足人形机器人需要以实用方式落地,这才是发展之道。他期待在硬件上有更多进展,用科学方式看待机器人融入现实世界。

在演讲中,雷伯特还介绍了波士顿动力公司过去多年在动态智能方面所做的工作,以及新成立的人工智能研究所如何将动态智能与认知智能相结合,使机器人在现实世界中更智能、更易交互、更实用。
他展示了波士顿动力公司开发的三种机器人:Spot四足机器人、Stretch仓库机器人和Atlas人形机器人,并介绍了它们在不同场景下的应用。其中,Atlas人形机器人展示了令人惊叹的平衡能力和自主执行任务的能力。
雷伯特表示,尽管人形机器人的想法复杂,且人们对人形生物的含义缺乏理解,但他相信人形机器人将在未来发挥重要作用。他期待缩小基于语言的认知智能与动态智能之间的差距,让机器人更智能地融入现实世界。
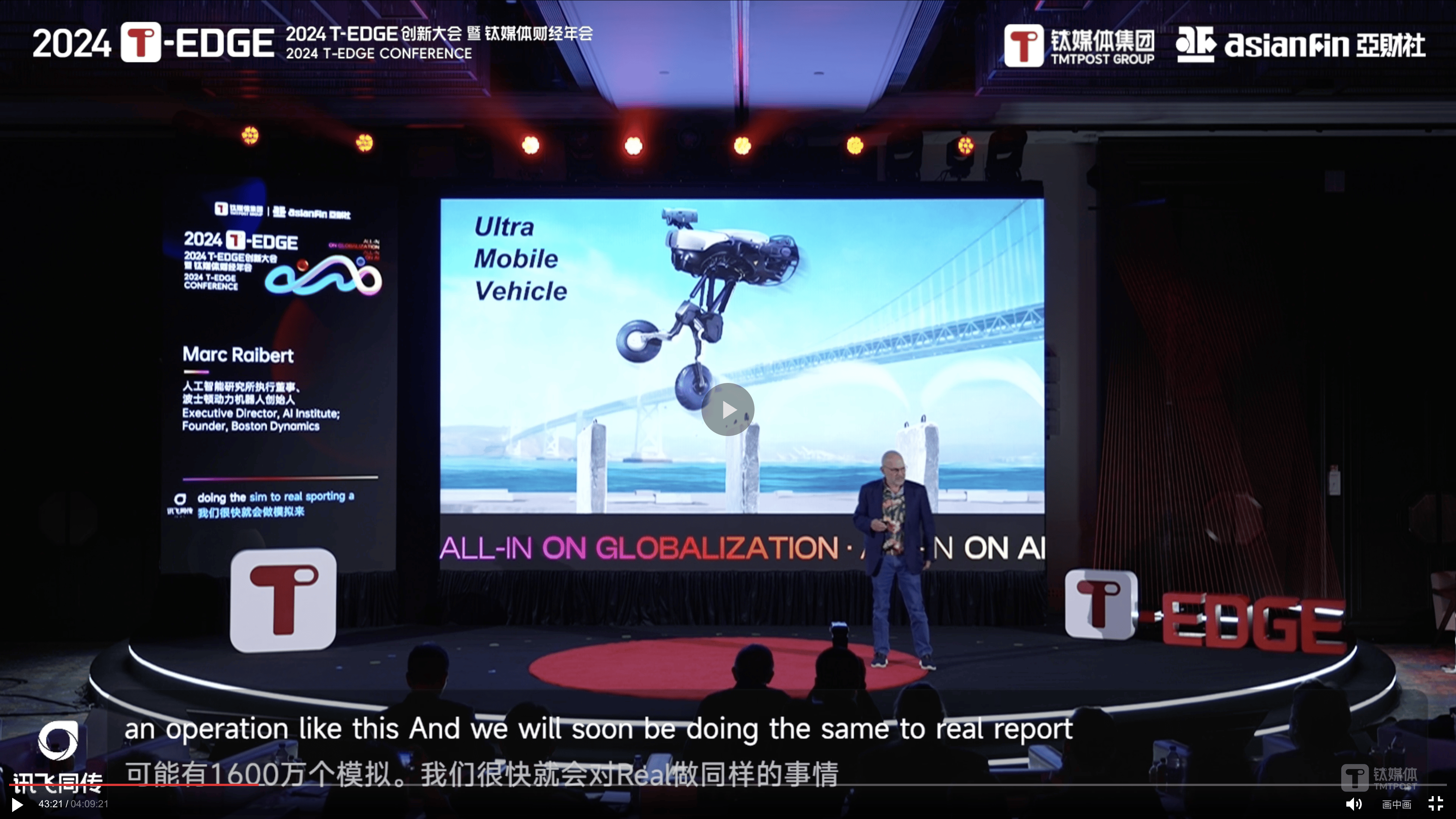
最后,雷伯特提到了波士顿动力公司正在进行的另一项研究:Ultra Mobile Vehicle(类似于山地自行车机器人)。这项研究旨在让机器人能够像人类一样使用自行车,通过投掷体重和视觉系统来制定计划,获得有趣的移动性。
雷伯特表示,他对机器人技术的未来充满期待,并感谢与会者的聆听。他的演讲为大会增添了浓厚的科技氛围,也为与会者带来了深刻的思考和启示。